CSIRO RTI Series (4): Device Application and Scheduling Design
Master-node scheduling and collision avoidance design for RSSI-based RTI.
CSIRO RTI Series (4): Device Application and Scheduling Design
Device Application Design for RTI
There are two firmware roles in this RTI system:
- Normal node: broadcasts packets and measures RSSI.
- Master node: schedules nodes and collects raw RSSI data.
The master sends command packets to control each node’s broadcast interval and iteration count.
A key challenge is radio interference. RTI heavily relies on RSSI quality, so simultaneous transmissions can corrupt measurements. To avoid this, I introduced a time-slot schedule where only one node broadcasts in each slot.
Example schedule (N=5 nodes, iteration=3):
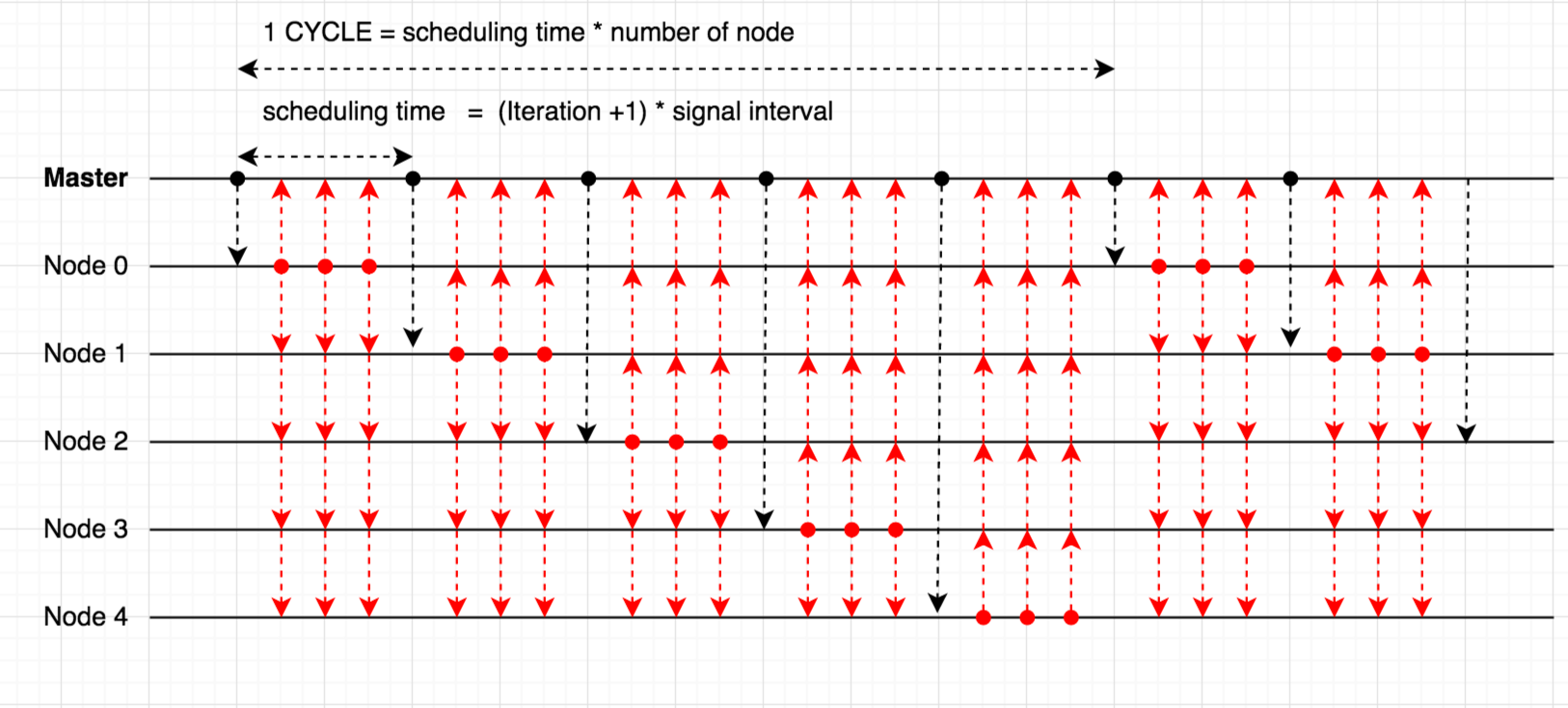
In each slot:
- The master issues a command (control plane)
- The selected node broadcasts 3 times (data plane)
- Payload includes RSSI summaries from the previous cycle
Example payload:
1
N 3 -46 -45 -43 0 -43
Meaning:
N: normal packet type3: node ID- Remaining values: average RSSI from each peer
0: self-link placeholder (node3 → node3)
Source code (original project):
- Normal node: https://github.com/generousRocky/radioTomography/tree/master/contiki-examples/radio_tomography
- Master node: https://github.com/generousRocky/radioTomography/tree/master/contiki-examples/rti_mater
2026 Update Note
- Migrated and language-polished in 2026.
- The time-slot scheduling design is still the key practical lesson: measurement quality collapses when concurrent transmissions are not controlled.
- This approach can be generalized to other low-power sensing networks where signal quality is central to inference.
이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.